
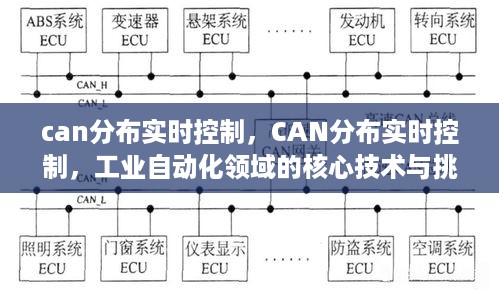
工业自动化领域的核心技术与挑战,CAN分布式实时控制研究
摘要:,,本文介绍了CAN分布实时控制在工业自动化领域的应用。CAN总线是一种通信协议,支持分布式实时控制系统。多个节点通过总线进行通信,实现数据的实时传输和共享。CAN分布实时控制通过协调各节点的数据采集、处理和控...

摘要:,,本文介绍了CAN分布实时控制在工业自动化领域的应用。CAN总线是一种通信协议,支持分布式实时控制系统。多个节点通过总线进行通信,实现数据的实时传输和共享。CAN分布实时控制通过协调各节点的数据采集、处理和控...


 蜀ICP备2022005971号-1
蜀ICP备2022005971号-1